
ROBAL® programvara för rotorbalansering
ROBAL® är en programvara som i kombination med MIVA® hårdvara utgör en universiell, kostnadseffektiv lösning för balansering av både styvt och rörligt monterade rotorer. Programvaran kan användas på fältet, under tillverkning hos slutkunden och för att balansera maskiner och spin-pits. All utrustning kan användas point-to-point mot en PC eller som client-server över lokalt nätverk eller Internet via en MIVA® Data Server centraldator. På så sätt möjliggörs en allmän lösning för balansering av roterande maskiner oavsett var du befinner dig.
Applikationer
MIVA® Rotor Balancing System kan användas till:
- Låghastighetsbalansering på balanserande maskiner med hårda eller mjuka lager
- Höghastighetsbalansering i spin-pit eller speciella balanserande ramar
- Balansering på fältet av fläktar, höghastighetscentrifuger, dekanteringscentrifuger osv
- Online balansering av turbingeneratorer, kalluftfläktar och andra slags maskiner
Systemkonfiguration för balansering
Online system
Onlinesystem kan användas i spin-pits och balanserande maskiner. Systemet består av en MIVA® Data Server (MDS) som är ansluten till en eller flera MIVA® Data Acquisition Units (DAU, datainsamlingsenheter). MDS kommunicerar med DAU över RS-485 (röd linje). En eller flera PC-klienter kan anslutas till MDS via Ethernet, antingen lokalt som en arbetsgrupp i kontrollrummet eller inom hela organisationen som en klient på företagets lokala nätverk.
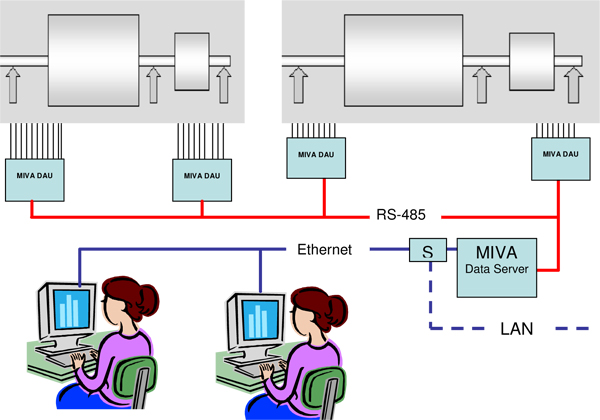
Varje DAU måste konfigureras för sin specifika balanseringsuppgift. En MIVA® 5000 DAU med parallell datainsamling rekommenderas för data som ska insamlas vid uppstart eller nedstängning. Sekventiell insamling kan vara tillräcklig så länge rotorns hastighet kan kontrolleras.
 MIVA® Data Server kan styra flera DAU. Dessa ska installeras på lämpliga ställen så nära maskinen eller lagren som möjligt för att minimera längden på den analoga kabeln.
MIVA® Data Server kan styra flera DAU. Dessa ska installeras på lämpliga ställen så nära maskinen eller lagren som möjligt för att minimera längden på den analoga kabeln.
Balansering på fältet
Balansering på fältet kan utföras med en laptop ansluten till en portabel DAU, t.ex. MIVA® 5100, MIVA® 5100S eller MIVA® Machine Protector (MMP). Den sistnämnda används normalt sett i fristående läge för online övervakning, men kan ställas om till online-läge för balansering med en bärbar dator och ROBAL®. Man kan anslta PC:n till MMP med en USB-2-RS-485 adapter.
Samma adapter kan också användas för anslutning till andra portabla, batteridrivna DAU-enheter. Notera att alla portabla enheter som VIKON erbjuder kan kopplas samman med RS-485. På så sätt minimeras längden på de analoga kablarna och installation på stora turbiner och liknande maskiner blir enkel.
 Onlineövervakning av obalans
Onlineövervakning av obalans
En speciell version av ROBAL® som heter CUMS (Continuous Unbalance Monitoring) kan installeras i PEMAC® -programvaran. CUMS används för onlineövervakning av rotorobalans. Data samlas in löpande och obalansen beräknas utifrån inverkande koefficienter från ROBAL® . När ett larm utlöses kan maskinoperatören avläsa vikten och vinkeln för den aktuella obalansen, och utfifrån detta avgöra om larmet är p.g.a. obalans eller annan orsak. Det gör att han kan fastställa och installera korrigerande vikter i samband med nästa tillfälle då produktionen möjliggör ett stopp av maskinen.
 Fjärrbalansering
Fjärrbalansering
MIVA® Data Server kan installeras i en anläggning och överföra svarsdata om obalans över Internet till en PC-klient med ROBAL® programvara för balansering. Det möjliggör ett kostnadseffektivt system för att underhålla maskinerna på distans.
Om ROBAL® programvara för rotorbalansering
ROBAL® är en programvara för rotorbalansering som utvecklats av VIKON Vibrationskonsult AB. Vår målsättning med ROBAL® är att omfatta alla former av balansering, från enkla balanseringar i ett plan till multipla plan i situationer där antalet korrektionsplan långt överskrider antalet linjärt oberoende ekvationer som syns i balanseringsdatat. ROBAL® används för balansering på fältet av fläktar, rotorer på generatorer, separatorer och andra styvt monterade rotorer som bara behöver två plan. Den har också framgångsrikt använts med låghastighetsbalanserande maskiner för balansering av både styvt och rörligt monterade rotorer vid hastigheter som är långt under den första kritiska böjningen. Metoderna som används i ROBAL® är baserade på teorier utvecklad av Dr. Ing. J. Dreschler och Lars Ove Larsson under första delen av 1970-talet. Dessa metoder har framgångsrikt använts för balansering av styvt och rörligt monterade rotoraxlar sedan mitten på 1970-talet.
Tekniska data
Följande grundläggande funktioner finns det stöd för i ROBAL®
- Datainsamling
- Beräkning av inverkande koefficienter
- Beräkning av obalans
- Beräkning av svarsobalans
- Utskrift av rapporter från balanseringen
- Export och import av balanseringsjobb
- Import av datafiler från tidigare versioner av ROBAL®
Maximalt antal balanseringsplan, mätpunkter och Point-Speed-Vector (PSV) element är:
| Plan: | 15 |
| Mätpunkter: | 30 |
| PSV-element: | 300 |
Balanseringskörningar och mätningar
 Balanseringskörning
Balanseringskörning
En körning definieras av den begynnande rotorobalansen, installerade externa korrigeringsvikter relativt föregående körning och det resulterande vibrationssvaret. En ny körning behövs när vikter har lagts till eller tagits bort eller när en uppenbar förändring av den begynnande obalansen har ägt rum, t.ex. på grund av assymetrisk bearbetning av rotoraxeln. I det fallet är det nödvändigt att ändra identitet för efterföljande körningar genom att ändra gruppnummer, Group Number. Det möjliggör att tillgängliga balanseringskörningar fortfarande kan användas för beräkning av inverkansmatrisen.
Mätningar
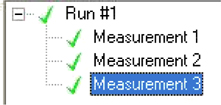
En eller flera mätningar kan göras i varje balanseringskörning. Till exempel Mätning 1 kan omfatta avläsningar vid 0% belastning, Mätning 2 kan vara 50% belastning och Mätning 3 kan vara 100% belastning. Vilken som helst av dessa eller ett snitt av alla eller några av dem kan användas som vibrationsdata i körningen. Denna funktion är användbar i situationer då förändringar i obalansen är beroende på externa faktorer.
Datainsamling
Datainsamlingen styrs av en separat modul i ROBAL® som klarar att hämta data automatiskt, på förbestämda tidsintervall eller manuellt. Komponenterna för vibrations-RMS, 1xN eller 2xN visas i realtid för varje kanal.
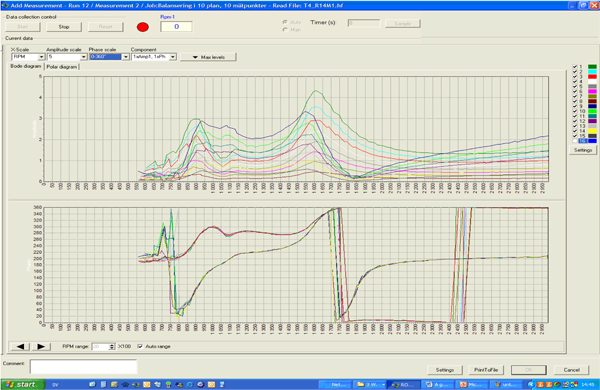
Vibrationsrådata lagras i filer som kan återimporteras till ROBAL®. Dessa filer kan också skapas lokalt i en fabrik av programvaran till MIVA® Data Server och överföras över t.ex. Internet för import till ROBAL®. Vibrationsdata motsvarande PSV-elementen lagras i ROBAL®-databasen och används för beräkning av obalans och inverkande koefficienter. Se nedanstående avsnitt "Beräkning av obalans".
Beräkning av inverkande koefficienter
Inverkansmatrisen specificerar den inverkan en grupp av korrigerande vikter har på vibrationssvaret. En grupp kan bestå av en vikt i ett enskilt balanserande plan eller en grupp av vikter motsvarande en specifik modal obalanskomponent, t.ex. den första kritiska. Inverkansmatrisen beräknas från alla tillgängliga balanskörningar utförda på rotorn inklusive testvägningar i ett eller flera plan och korrigeringsvikterna som installerats för att balansera rotorn.
Inverkansmatrisen beror på designen. Under förutsättning att designen förblir oförändrad från en dynamisk synvinkel, kommer matrisen att vara densamma. Detta innebär uppenbara praktiska fördelar eftersom det tillåter direkt ombalansering med en gammal inverkansmatris utan att göra nya testkörningar. Vi har exempel där en inverkansmatris beräknad flera år tillbaks fortfarande kan användas för att balansera en maskin på bara ett fåtal försök.
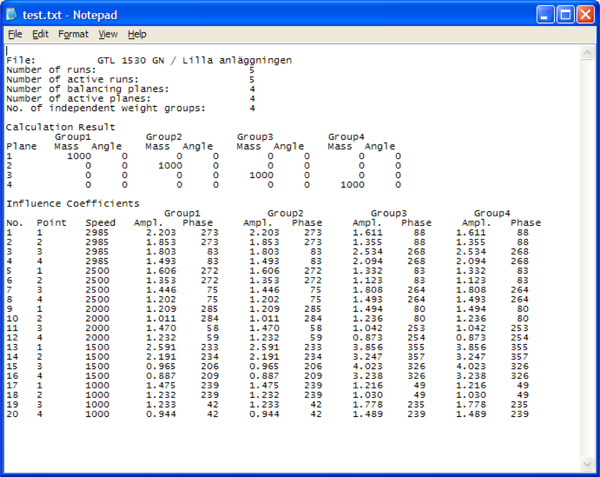
Nedanstående exempel visar en utskrift av en inverkansmatris där tillräckligt linjärt oberoende balanseringskörningar har gjorts för att möjliggöra separering av enstaka vikter i de balanserande planen.
Beräkning av obalans
Obalansen beräknas omedelbart efter att en balanskörning slutförts, dvs där datainsamlingsmodulen har stängts. Resultaten visas i ett kalkylblad likt det nedanstående.
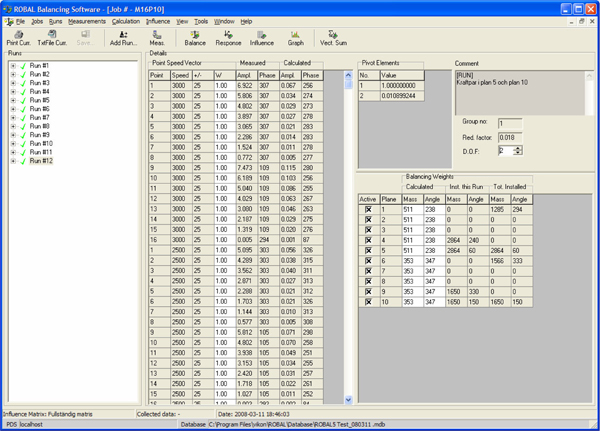
Inom fönstren som specificerar Point-Speed-Vector-elementen (PSV) tas medelvärden fram från data som samlats in under körningen. Varje element definieras av en mätpunkt och ett hastighetsfönster (N±Drpm). En viktfaktor W kan tilldelas varje PSV-element.
Beräkningen regleras av antalet frihetsgrader (DOF) och de aktiva balanseringsplanen. Varje DOF relaterar till ett visst läge av obalans. Det mest förekommande är det första i listan av pivotelement (1.000000). Pivotelementen indikerar hur många linjärt oberoende ekvationer (LIEQ) som kan hittas i datat, se nästa avsnitt.
Reduceringsfaktorn visar förväntad reducering av de verkliga vibrationerna efter att beräknade vikter har installerats. Både de uppmätta och förväntade (Calculated) vibrationssvaren visas på kalibreringsbladet. Bladet visar också totalt installerade vikter.
 Pivotelementet
Pivotelementet
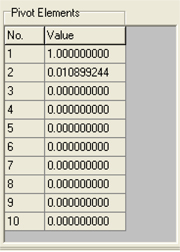
Värden som visas under "Pivot Elements" är en unik funktion i ROBAL®. Om dessa värden tolkas på rätt sätt kan de hjälpa dig att spara mycket tid och undvika onödiga testkörningar.
Balansering handlar om att lösa linjära ekvationer. Ett PSV-element motsvarar en ekvation. Teoretiskt sett skulle du kunna ha så många som 300 ekvationer att lösa för att beräkna obalansen i t.ex. 10 plan. Praktiskt sett är det högst osannolikt att alla ekvationer är linjärt oberoende. Antalet linjärt oberoende ekvationer (LIEQ) beror på hur obalansen är fördelad och de dynamiska egenskaperna i rotorns design, stödjande struktur och rotorhastigheten.
När värdena för pivotelementen plötsligt sjunker till noll som i ovanstående exempel, indikerar det att vi har bara två LIEQ och därför kan bara balansera ut två lägen. Försök att balansera in fler plan än antalet LIEQ kommer otvetydigt att leda till problem. Det är faktiskt en av anledningarna till måna så kallade "balanseringsproblem" där dagar och veckor gått åt för att försöka balansera en maskin.
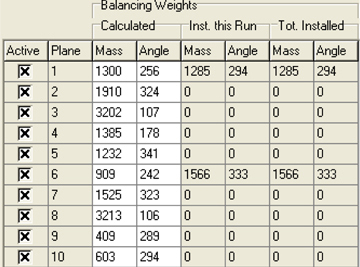
Med ROBAL® kan du undvika detta problem och trots allt balansera rotorn på kort tid. Genom att reducera frihetsgraderna till antalet LIEQ kan du fortfarande beräkna obalansen korrekt i så många plan som du angett. Bilden till vänster nedan visar resultaten med 10 DOF. Bilden till höger har 2 DOF, det verkliga antalet LIEQ, och visar korrekta resultat. Där beräknas vikterna med utgångspunkt från existerande lägen och minimerar resterande internt böjmoment, det som kan böja rotorn vid högre hastigheter, högre än balanseringshastigheten. På så sätt får du alltid den bästa möjliga kvaliteten på balanseringen.
 |
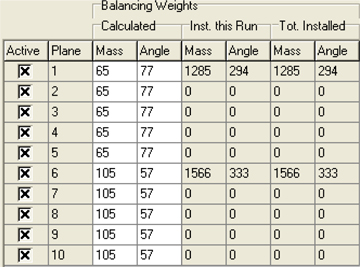 |
| Obalans beräknad med 10 DOF | Obalans beräknad med 2 DOF |